
Recommended
Recommended
More Related Content
Similar to VetoresDefinições
Similar to VetoresDefinições (20)
Recently uploaded
VetoresDefinições
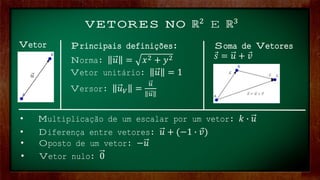
- 1. Vetor Principais definições: Norma: 𝑢 = 𝑥2 + 𝑦2 Vetor unitário: 𝑢 = 1 Versor: 𝑢𝑉 = 𝑢 𝑢 Soma de Vetores Ԧ 𝑠 = 𝑢 + Ԧ 𝑣 • Multiplicação de um escalar por um vetor: 𝑘 ∙ 𝑢 • Diferença entre vetores: 𝑢 + (−1 ∙ Ԧ 𝑣) • Oposto de um vetor: −𝑢 • Vetor nulo: 0 VETORES NO ℝ2 E ℝ3
- 2. Seja 𝑢 = 𝑥1, 𝑦1, 𝑧1 ; Ԧ 𝑣 = 𝑥2, 𝑦2, 𝑧2 ; 𝑤 = 𝑥3, 𝑦3, 𝑧3 ∈ ℝ3 então: Produto Escalar: 𝑢 ∙ Ԧ 𝑣 = 𝑥1 ∙ 𝑥2 + 𝑦1 ∙ 𝑦2 + 𝑧1 ∙ 𝑧2 Produto Vetorial: 𝑢 × Ԧ 𝑣 = Ԧ 𝑖 Ԧ 𝑗 𝑘 𝑥1 𝑦1 𝑧1 𝑥2 𝑦2 𝑧2 = 𝑦1 𝑧1 𝑦2 𝑧2 Ԧ 𝑖 − 𝑥1 𝑧1 𝑥2 𝑧2 Ԧ 𝑗 + 𝑥1 𝑦1 𝑥2 𝑦2 𝑘 𝑢 × Ԧ 𝑣 = 𝑦1 ∙ 𝑧2 − 𝑧1 ∙ 𝑦2 Ԧ 𝑖 − 𝑥1 ∙ 𝑧2 − 𝑧1 ∙ 𝑥2 Ԧ 𝑗 + 𝑥1 ∙ 𝑦2 − 𝑦1 ∙ 𝑥2 𝑘 VETORES NO ℝ2 E ℝ3
- 3. VETORES NO ℝ2 E ℝ3 Vetores canônicos: Ԧ 𝑖 = 1,0,0 ; Ԧ 𝑗 = 0,1,0 ; 𝑘 = 0,0,1 Produto Misto: 𝑢, Ԧ 𝑣, 𝑤 = 𝑢 ∙ ( Ԧ 𝑣 × 𝑤) 𝑢, Ԧ 𝑣, 𝑤 = 𝑥1 𝑦1 𝑧1 𝑥2 𝑦2 𝑧2 𝑥3 𝑦3 𝑧3
- 4. Aplicação do Produto Vetorial: Aplicação do Produto Misto: 𝐴𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑜𝑔𝑟𝑎𝑚𝑜 = 𝑢 × Ԧ 𝑣 𝐴𝑡𝑟𝑖â𝑛𝑔𝑢𝑙𝑜 = ‖𝑢 × Ԧ 𝑣 ‖ 2 𝑉𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑒𝑝í𝑝𝑒𝑑𝑜 = 𝑢, Ԧ 𝑣, 𝑤 VETORES NO ℝ2 E ℝ3
- 5. 𝐴𝑃 = 𝑡 ∙ Ԧ 𝑣 RETAS E PLANOS Seja 𝑃 𝑥, 𝑦, 𝑧 ; 𝐴(𝑥1, 𝑦1, 𝑧1) ∈ 𝑟 e Ԧ 𝑣//𝑟, onde Ԧ 𝑣(𝑎, 𝑏, 𝑐) chama-se vetor diretor, tem-se que 𝐴𝑃//𝑣. Então existe 𝑡 ∈ ℝ tal que ቐ 𝑥 = 𝑥1 + 𝑡 ∙ 𝑎 𝑦 = 𝑦1 + 𝑡 ∙ 𝑏 𝑧 = 𝑧1 + 𝑡 ∙ 𝑐 Equação Vetorial da reta Equações Paramétricas da reta
- 6. Equação Reduzida da reta (relação a variável 𝑥) RETAS E PLANOS 𝑚 = 𝑦2 − 𝑦1 𝑥2 − 𝑥1 = 𝑡𝑔 𝛼 Coeficiente angular da reta 𝑦 = 𝑏𝑥 𝑎 + 𝑏𝑥1 𝑎 + 𝑦1 𝑧 = 𝑐𝑥 𝑎 + 𝑐𝑥1 𝑎 + 𝑧1 𝑥−𝑥1 𝑎 = 𝑦−𝑦1 𝑏 = 𝑧−𝑧1 𝑐 Equações Simétricas da reta
- 7. RETAS E PLANOS Seja um plano 𝜋, um ponto 𝐴(𝑥1, 𝑦1, 𝑧1) ∈ 𝜋 e 𝑢 e Ԧ 𝑣 não paralelos entre si mas 𝑢 𝑎1, 𝑏1 , 𝑐1 ; Ԧ 𝑣(𝑎2, 𝑏2 , 𝑐2)// 𝜋. Então um ponto 𝑃 𝑥, 𝑦, 𝑧 ∈ 𝜋 ↔ 𝑃 − 𝐴, 𝑢, Ԧ 𝑣//𝜋, o que equivale a dizer que 𝑃 − 𝐴 pode ser expresso em função de 𝑢 e Ԧ 𝑣: Equação Vetorial do plano 𝑃 − 𝐴 = 𝑡 ∙ 𝑢 + ℎ ∙ Ԧ 𝑣 𝑃 = 𝐴 + 𝑡 ∙ 𝑢 + ℎ ∙ Ԧ 𝑣
- 8. Equações Paramétricas do plano: ቐ 𝑥 = 𝑥1 + 𝑡 ∙ 𝑎1 + ℎ ∙ 𝑎2 𝑦 = 𝑦1 + 𝑡 ∙ 𝑏1 + ℎ ∙ 𝑏2 𝑧 = 𝑧1 + 𝑡 ∙ 𝑐1 + ℎ ∙ 𝑐2 RETAS E PLANOS Seja um plano 𝜋, um ponto 𝐴(𝑥1, 𝑦1, 𝑧1) ∈ 𝜋 e um vetor 𝑛(𝑎, 𝑏, 𝑐) ≠ 0 ortogonal a 𝜋 chamado vetor normal a 𝜋. Um ponto 𝑃 𝑥, 𝑦, 𝑧 ∈ 𝜋 ↔ 𝑃 − 𝐴 ⊥ 𝑛 o que equivale a 𝐴𝑃 ∙ 𝑛 = 0 ou 𝑃 − 𝐴 ∙ 𝑛 = 0. 𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 − 𝑎𝑥1 − 𝑏𝑦1 − 𝑐𝑧1 = 0 𝑎𝑥 + 𝑏𝑦 + 𝑐𝑧 + 𝑑 = 0 Equação Geral do plano
- 9. Posições relativas entre Planos RETAS E PLANOS Planos paralelos: Dois planos são paralelos se, e somente se, são coincidentes ou não possuem ponto em comum. Planos secantes: Dois planos são secantes se, e somente se, a intersecção entre os dois é uma reta.
- 10. Ângulo entre duas retas RETAS E PLANOS Ângulo entre dois planos 𝜃 = 𝑎𝑟𝑐 𝑐𝑜𝑠 𝑢 ∙ Ԧ 𝑣 𝑢 ∙ Ԧ 𝑣 𝜃 = 𝑎𝑟𝑐 𝑐𝑜𝑠 𝑛1 ∙ 𝑛2 𝑛1 ∙ 𝑛2
- 11. Distância entre pontos: Se 𝐴(𝑥1, 𝑦1, 𝑧1) e 𝐵(𝑥2, 𝑦2, 𝑧2) então RETAS E PLANOS Ponto que divide um segmento de reta ao meio: Dados 𝑑 𝐴, 𝐵 = (𝑥1−𝑥2)2 + (𝑦1−𝑦2)2 + (𝑧1−𝑧2)2 𝑃1(𝑥1, 𝑦1, 𝑧1) e 𝑃2(𝑥2, 𝑦2, 𝑧2), um ponto 𝑃 𝑥, 𝑦, 𝑧 divide 𝑥 = 𝑥1 + 𝑥2 2 𝑦 = 𝑦1 + 𝑦2 2 𝑧 = 𝑧1 + 𝑧2 2 𝑃1𝑃 = −𝑃2𝑃, então: 𝑃1𝑃2 ao meio se
- 12. O ponto 𝑃 𝑥, 𝑦 pertence a circunferência se, e CIRCUNFERÊNCIA somente se, 𝑑 𝐶, 𝑃 = 𝑟. Então: (𝑥 − 𝑎)2+(𝑦 − 𝑏)2= 𝑟 (𝑥 − 𝑎)2+(𝑦 − 𝑏)2= 𝑟2 Equação Reduzida da circunferência 𝑥2 + 𝑦2 − 2𝑎𝑥 − 2𝑏𝑦 + 𝑎2 + 𝑏2 − 𝑟2 = 0 Equação Geral da circunferência
- 13. CIRCUNFERÊNCIA Posição relativa entre uma Reta e uma Circunferência A distância da reta ao centro da circunferência é dada por: 𝑑 𝐶, 𝑠 = 𝑎𝑥0 + 𝑏𝑦0 + 𝑐 𝑎2 + 𝑏2 onde: 𝐶(𝑥0, 𝑦0) e 𝑠: 𝑎𝑥 + 𝑏𝑦 + 𝑐 = 0.
- 14. Parábola: consiste no lugar geométrico dos pontos do plano que são equidistantes do foco e da diretriz. CÔNICAS Eixo y: dado um 𝑃 𝑥, 𝑦 da parábola com 𝐹 0, 𝑝 2 , então: 𝑥2 = 2𝑝𝑦 Equação Reduzida 𝑃𝐹 = 𝑃𝑃′
- 15. Eixo x: dado 𝑃 𝑥, 𝑦 da parábola com 𝐹 𝑝 2 , 0 , então: CÔNICAS 𝑦2 = 2𝑝𝑥 Equação Reduzida Translação de eixos ቊ 𝑥′ = 𝑥 − ℎ 𝑦′ = 𝑦 − 𝑘 Fórmulas de translação
- 16. Dado 𝑃 𝑥, 𝑦 da parábola de vértice 𝑉 ℎ, 𝑘 . CÔNICAS 𝑥′2 = 2𝑝𝑦′ Eixo paralelo ao eixo y Eixo paralelo ao eixo x (𝑥 − ℎ)2= 2𝑝(𝑦 − 𝑘) 𝑦′2 = 2𝑝𝑥′ (𝑦 − 𝑘)2= 2𝑝(𝑥 − ℎ)
- 17. CÔNICAS Elipse: consiste no lugar geométrico dos pontos do plano cuja soma das distâncias a dois pontos fixos desse plano é constante. Elementos Excentricidade: 𝑒 = 𝑐 𝑎 𝑐 < 𝑎 → 0 < 𝑒 < 1 Importante: 𝑎2 = 𝑏2 + 𝑐2 𝑃𝐹1 + 𝑃𝐹2 = 2𝑎
- 18. CÔNICAS Eixo maior x: dado 𝑃 𝑥, 𝑦 da elipse com 𝐹1 −𝑐, 0 e 𝐹2(𝑐, 0), então: 𝑥2 𝑎2 + 𝑦2 𝑏2 = 1 Eixo maior y: dado 𝑃 𝑥, 𝑦 da elipse com 𝐹1 0, −𝑐 e 𝐹2(0, 𝑐), então: 𝑥2 𝑏2 + 𝑦2 𝑎2 = 1
- 19. CÔNICAS Translação de eixos: Dado 𝑃 𝑥, 𝑦 da elipse de 𝐶 ℎ, 𝑘 . Eixo maior // x Eixo maior // y (𝑥 − ℎ)2 𝑎2 + (𝑦 − 𝑘)2 𝑏2 = 1 (𝑥 − ℎ)2 𝑏2 + (𝑦 − 𝑘)2 𝑎2 = 1
- 20. CÔNICAS Hipérbole: consiste no lugar geométrico dos pontos do plano cuja diferença das distâncias em valor absoluto, a dois pontos fixos desse plano é constante. 𝑃𝐹1 − 𝑃𝐹2 = 2𝑎 Elementos Importante: Excentricidade: 𝑒 = 𝑐 𝑎 𝑐 > 𝑎 → 𝑒 > 1 𝑐2 = 𝑎2 + 𝑏2
- 21. CÔNICAS Eixo real x: dado 𝑃 𝑥, 𝑦 da hipérbole com 𝐹1 −𝑐, 0 e 𝐹2(𝑐, 0), então: 𝑥2 𝑎2 − 𝑦2 𝑏2 = 1 Eixo real y: dado 𝑃 𝑥, 𝑦 da elipse com 𝐹1 0, −𝑐 e 𝐹2(0, 𝑐), então: 𝑦2 𝑎2 − 𝑥2 𝑏2 = 1
- 22. CÔNICAS Eixo real // x (𝑥 − ℎ)2 𝑎2 − (𝑦 − 𝑘)2 𝑏2 = 1 Eixo real // y (𝑦 − 𝑘)2 𝑎2 − (𝑥 − ℎ)2 𝑏2 = 1
- 23. QUÁDRICAS Quádricas centradas ± 𝑥2 𝑎2 ± 𝑦2 𝑏2 ± 𝑧2 𝑐2 = 1 Quádricas não centradas ± 𝑥2 𝑎2 ± 𝑦2 𝑏2 = 𝑐𝑧 ± 𝑥2 𝑎2 ± 𝑧2 𝑐2 = 𝑏𝑦 ± 𝑦2 𝑏2 ± 𝑧2 𝑐2 = 𝑎𝑥 Forma canônica ou padrão: A intersecção de uma superfície quádrica com um dos planos coordenados ou por planos paralelos é uma cônica. [Traço] Forma canônica ou padrão:
- 24. QUÁDRICAS CENTRADAS Elipsóide 𝑥2 𝑎2 + 𝑦2 𝑏2 + 𝑧2 𝑐2 = 1 Hiperbolóide de uma folha 𝑥2 𝑎2 + 𝑦2 𝑏2 − 𝑧2 𝑐2 = 1 𝑥2 𝑎2 − 𝑦2 𝑏2 + 𝑧2 𝑐2 = 1 − 𝑥2 𝑎2 + 𝑦2 𝑏2 + 𝑧2 𝑐2 = 1 − 𝑥2 𝑎2 + 𝑦2 𝑏2 − 𝑧2 𝑐2 = 1 𝑥2 𝑎2 − 𝑦2 𝑏2 − 𝑧2 𝑐2 = 1 − 𝑥2 𝑎2 − 𝑦2 𝑏2 + 𝑧2 𝑐2 = 1 Hiperbolóide de duas folhas
- 25. QUÁDRICAS NÃO CENTRADAS Parabolóide Elíptico 𝑥2 𝑎2 + 𝑦2 𝑏2 = 𝑐𝑧 Parabolóide Hiperbólico 𝑦2 𝑏2 − 𝑥2 𝑎2 = 𝑐𝑧 𝑧2 𝑐2 − 𝑥2 𝑎2 = 𝑏𝑦 𝑧2 𝑐2 − 𝑦2 𝑏2 = 𝑎𝑥 𝑥2 𝑎2 + 𝑧2 𝑐2 = 𝑏𝑦 𝑦2 𝑏2 + 𝑧2 𝑐2 = 𝑎𝑥
- 26. SUPERFÍCIE CÔNICA É toda linha (diretriz) que se obtém como intersecção de um plano com uma superfície cônica. Uma superfície cônica é a superfície gerada pela rotação completa de uma reta (geratriz), em um ponto fixo (vértice) em torno de um − 𝑥2 𝑎2 + 𝑦2 𝑏2 + 𝑧2 𝑐2 = 0 𝑥2 𝑎2 + 𝑦2 𝑏2 − 𝑧2 𝑐2 = 0 𝑥2 𝑎2 − 𝑦2 𝑏2 + 𝑧2 𝑐2 = 0 eixo, formando com este sempre o mesmo ângulo, até completar uma volta completa.
- 27. SUPERFÍCIE CILÍNDRICA É a superfície gerada por uma linha reta (r) que se move, de maneira que é sempre paralela a uma dada reta fixa (f) e passa sempre por uma curva fixa (C) dada. A curva C é a diretriz da superfície cilíndrica e a reta r é a geratriz. De acordo com a diretriz, a superfície cilíndrica é chamada elíptica, hiperbólica, parabólica ou circular.
- 28. COORDENADAS POLARES No sistema de coordenadas polares, as coordenadas consistem de uma distância e da medida de um ângulo em relação a um ponto fixo e a uma distância fixa. Relação entre o sistema de coordenadas cartesianas e o sistema de coordenadas polares
- 29. COORDENADAS POLARES Seja P um ponto de coordenadas cartesianas e coordenadas polares. Para o 1° quadrante tem-se: 𝑟 > 0 𝑐𝑜𝑠 𝜃 = 𝑥 𝑟 𝑠𝑒𝑛 𝜃 = 𝑦 𝑟 𝑟 < 0 𝑐𝑜𝑠 𝜃 = −𝑥 −𝑟 𝑠𝑒𝑛 𝜃 = −𝑦 −𝑟 ∴ ቊ 𝑥 = 𝑟 𝑐𝑜𝑠 𝜃 𝑦 = 𝑟 𝑠𝑒𝑛 𝜃 ቊ 𝑥2 = 𝑟2 𝑐𝑜𝑠2 𝜃 𝑦2 = 𝑟2 𝑠𝑒𝑛2𝜃 ∴ 𝑟 = ± 𝑥2 + 𝑦2 → ( )2 → (+)