
Recommended
More Related Content
Recently uploaded
Recently uploaded (20)
Featured
Featured (20)
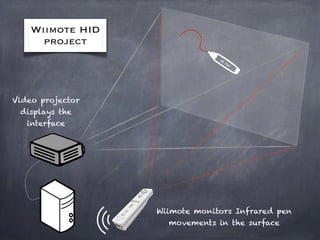
Wiimote HID project monitors Infrared pen movements displayed by video projector
- 1. Wiimote HID project IR Pe n Video projector displays the interface Wiimote monitors Infrared pen movements in the surface
- 2. Simplified process Server Infrared pen IR Video projector Pe n Render the interface Change of coordinates Wiimote’s Infrared sensor Calculation of robot movements Robot
- 3. Projected interface 1 White circle follows the infrared pen 2 Every second, a red line is drawn 3 Angle and length of the red line are sent to Peekee 4 Robot moves accordingly