
Recommended
More Related Content
Similar to Registro de asesoria Power Bots
Similar to Registro de asesoria Power Bots (20)
Recently uploaded
Recently uploaded (20)
Registro de asesoria Power Bots
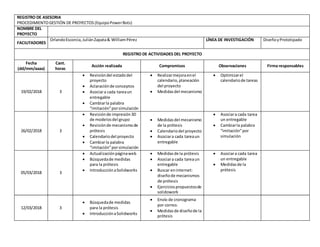
- 1. REGISTRO DE ASESORIA PROCEDIMIENTOGESTIÓN DE PROYECTOS (EquipoPowerBots) NOMBRE DEL PROYECTO FACILITADORES OrlandoEscorcia,JuliánZapata& WilliamPérez LÍNEA DE INVESTIGACIÓN DiseñoyPrototipado REGISTRO DE ACTIVIDADES DEL PROYECTO Fecha (dd/mm/aaaa) Cant. horas Acción realizada Compromisos Observaciones Firma responsables 19/02/2018 3 Revisióndel estadodel proyecto Aclaraciónde conceptos Asociara cada tareaun entregable Cambiarla palabra “imitación”porsimulación Realizarmejoraenel calendario,planeación del proyecto Medidasdel mecanismo Optimizarel calendariode tareas 26/02/2018 3 Revisiónde impresión3D de modelosdel grupo Revisiónde mecanismode prótesis Calendariodel proyecto Cambiarla palabra “imitación”porsimulación Medidasdel mecanismo de la prótesis Calendariodel proyecto Asociara cada tareaun entregable Asociara cada tarea un entregable Cambiarla palabra “imitación”por simulación 05/03/2018 3 Actualizaciónpáginaweb Búsquedade medidas para la prótesis IntroducciónaSolidworks Medidasde la prótesis Asociara cada tareaun entregable Buscar eninternet: diseñode mecanismos de prótesis Ejerciciospropuestosde solidowork Asociara cada tarea un entregable Medidasde la prótesis 12/03/2018 3 Búsquedade medidas para la prótesis IntroducciónaSolidworks Envío de cronograma por correo. Medidasde diseñode la prótesis
- 2. 09/04/2018 3 Entrenamientode solidwork Modificacionesenel planteamientoteórico Bocetosde muñon Molde para muñón Bocetodel mecanismo de la pierna Planeaciónde tareas 16/04/18 3 Entrenamientode solidwork Modificacionesenel planteamientoteórico Bocetosde muñón Molde para muñón Bocetodel mecanismo de la pierna Planeación de tareas 30/04/18 3 Entrenamientode solidwork Modificacionesenel planteamientoteórico Bocetosde muñón Molde para muñón Bocetodel mecanismo de la pierna Planeaciónde tareas Medidasde la pata simétrica Obtenerradiografía de la pata simétrica con el finde establecerlas medidasde los eslabonesdel mecanismode la pata 7/05/2018 3 Corte de molde Entrenamientoenel uso de basesde datos del SENA Bocetodel mecanismo de la pierna Planeaciónde tareas Medidasde la pata simétrica Obtenerradiografía de la pata simétrica con el finde establecerlas medidasde los eslabonesdel mecanismode la pata 21/05/18 3 Diseñode eslabónde mecanismoenSolidWork Medidasde la pata simétrica Planeaciónde tareas Bocetodel mecanismo de la pierna Planeaciónde tareas Medidasde la pata simétrica Obtenerradiografía de la pata simétrica con el finde establecerlas medidasde los eslabonesdel mecanismode la pata 28/05/18 3 Impresiónde eslabón principal de laprótesis Se realizaronlosCADsde losotros eslabones Organizary clasificarlos CADs Pasar el cronograma de trabajo – diagramade Gantt – a Excel
- 3. RealizarunplanB en caso que las impresorasnoestén operativas Se sugiere enfocarse y delimitarel proyectocon el fin de progresarmás en el proyecto 9/07/18 3 Propuestade construcción de mecanismode Theo Jansen Construcción de un mecanismode Theo Janses Conseguirlas medidas paramétricasdel mecanismode Theo Jansen 23/07/2018 3 Impresiónyconstrucción de mecanismode Theo Jansen Encontrar estrategias de entradade movimientoparael mecanismoconstruido Verificarqué tipode motor tiene la potenciasuficiente para poneren marcha el mecanismo 24/07/2018 3 Construcciónde mecanismode Theo Jansen.Análisisde marcha Finalzarconstrucciónde mecanismode Theo Jansen Investigarcomoleer CSV con Python Contactar con Lady Buitragoque esla responsable delperro Rocky El mecanismo prototipadoserá movidocon manivela.Se sugiere enun futuro realizarloconun motor. Un eslabóndel mecanismodebe ser fijo. 13/08/2018 3 Búsquedade máquinasde extrusión Investigaciónpreliminar del procesode extrusión de termoplásticosconel finde convertirloenhilos para prototipadoras Avanzarenel estudio de marcha Considerarque el procesode extrusión podría provocar un desvíodel objetivo principal del proyecto Considerarla implementaciónde Pythonenla lectura
- 4. de datos de marcha enformatoCSV 27-08-2018 3 Realizaciónde análisisde marcha con la aplicación kinovea Exportación de datos a Excel y/o.CSV como trayectoria, velocidad, tiempoque arrojael canino construcciónde grafica Insertargraficasenel documento Finalizarel análisisde marcha 03-09-2018 3 Avanzamosmásenel análisisde marchaen kinovea Investigación enconcurso de robótica realizacióngraficasde ángulos Finalizaranálisisde las gráficasde marcha Las gráficasestánen pixeles.Se sugiere transformarlasa unidadesdel SI 10/09/18 3 QuedaronenLoyolapara adelantarconcursode robótica 17/09/2018 3 Análisisde movimientodel canino Estudiode la leyde coseno Solucionarel triángulo para 5 posicionesdel intervalode movimiento Elegir un punto absoluto como sistema de coordenada de movimiento 24/09/18 3 Trabajaronen el diseñode eslabonesparapresentar enla feriade la construcción Prepararpostery prototipo para ser presentadoenlaferia de la construcción REGISTRO DE ASESORIA PROCEDIMIENTOGESTIÓN DE PROYECTOS NOMBRE DEL PROYECTO
- 5. FACILITADORES LÍNEA DE INVESTIGACIÓN REGISTRO DE ACTIVIDADES DEL PROYECTO Fecha (dd/mm/aaaa) Cant. horas Acción realizada Compromisos Observaciones Firma responsables